提供细胞实验室整体解决方案
致力于为细胞行业开发易于操作、使用灵活、安全性高的智能化机器人,以帮助用户提高工作效率、提升科技水平
简便的控制界面,只需简单培训,操作人员就能轻松按照实验要求修改参数或重新编程,用于任何特殊细胞株操作或其他动作。
同时现已开发出多套全自动化系统,基本都使用365六轴机器人作为系统核心。
通过采用更紧凑的机型,可帮助实验员快速,重复地培养无污染的干细胞和其他贴壁细胞,用于自体和异体干细胞治疗的临床试验。
专注于细胞设备和智慧细胞应用解决方案
专注于AI智能机器人细胞设备和智慧细胞场景应用方案的研发、设计、生产及销售,打造智能机器人细胞设备第一品牌。机器人365致力于研发易于操作、使用灵活且安全的细胞机器人设备,以帮助用户提高工作效率。拥有国内生物干细胞行业实验室智能化设备的大量成功应用案例,是干细胞培育机器人的领创者。
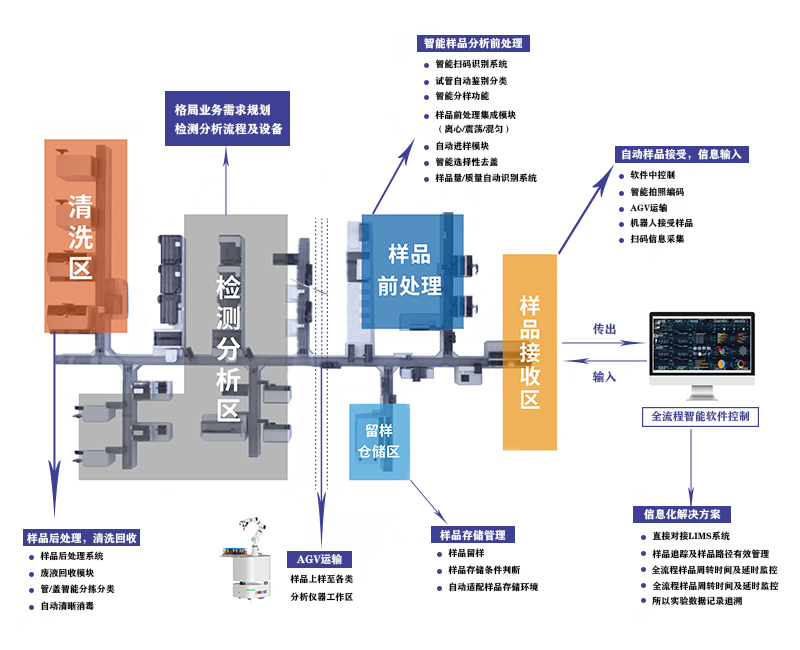
实验室自动化操作流程 解决医疗实验室核心痛点
实验室自动化可以实现移液、加盖、称量之类的简单应用需求,到复杂的机器人和分析系统、过程跟踪和存储一体化系统。这导致自动化技术可以在医学、生命科学、制药、食品、生物化学、分析检测等领域广泛应用。从而大规模提供一致、无偏且具有生物相关性的结果。
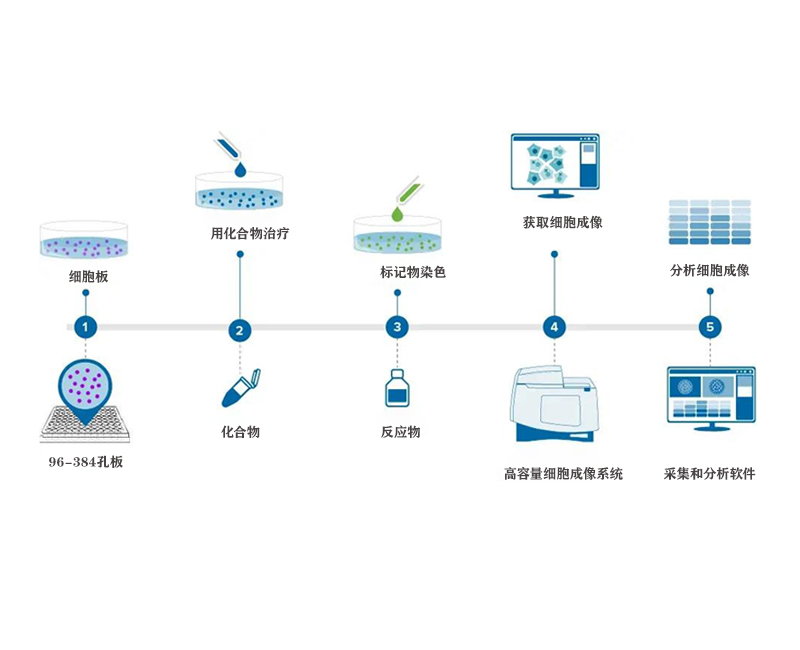
细胞成像,采集和分析 细胞分析工作流程
细胞接种,将细胞接种到所选的实验室器具中,处理细胞,使用所需化合物处理,细胞标记物染色,使用所需荧光团,标记细胞采集细胞图像,将平板放入细胞成像系统,然后开始采集您的活细胞图像,分析细胞图像,使用细胞成像分析软件对活细胞图像进行定量分析。
细胞自动化实验室 解决实验室核心痛点
我们积累了强大的研发能力和项目落地能力,是国内领先的实验室自动化、智能化系统供应商。帮助您从低效的实验室人工操作中解放出来,提供最优质的产品定制服务,按照您的实验室需求构建全面流程化解决方案,机器人365“全流程自动化”解决方案助力机构实现“未来实验室”!
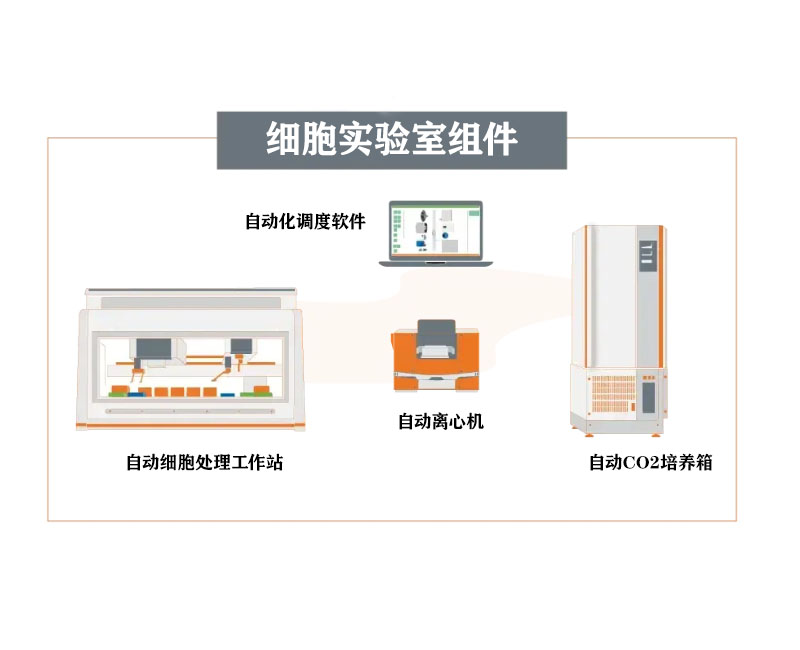
CO₂恒温培养箱
精准温度,CO₂浓度控制细培养细胞加液器
培养液更换、细胞采收、胰酶蛋白处理控制柜总成
储液罐、电源,空压机、模块化配件,安装简便废液处理放置架
收集瓶放置架、可容纳12个自适应机械爪
可更换不同类型机械爪、抓取多种规格培养瓶、离心管细胞加液器
培养液更换、细胞采收、胰酶蛋白处理高精度多轴机械臂
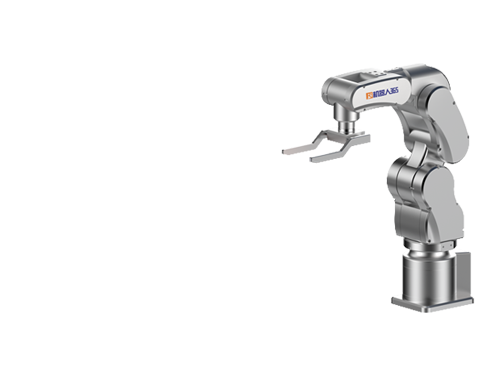
机械臂配合机械手灵活使用程序化设计模拟人体操作显微镜
进口195广角物镜、实时检测、数据收集10000倍高洁第一代培养箱机器人
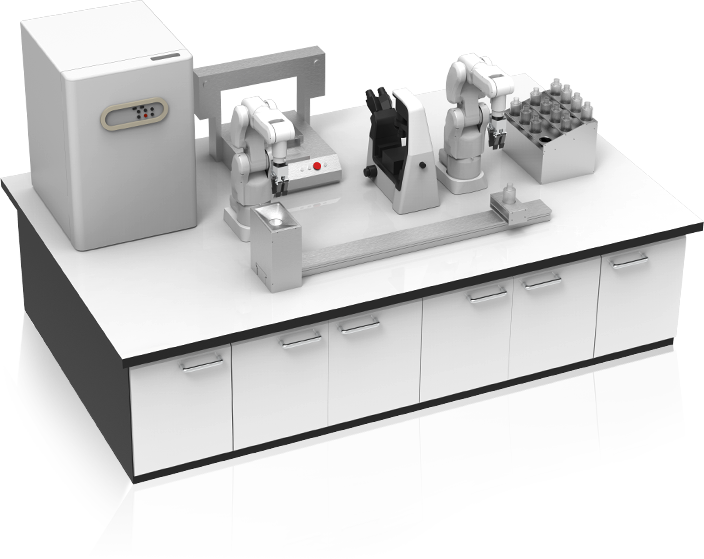
培养箱机器人是机器人365公司全自主研发的首台生命科学机器人产品,其核心是两台高精准、洁净的BG-ROBOT365生命科学机器人,搭载机器人365核心控制器系统,主要用于取代人工重复性工作。
BG-ROBOT365生命科学机器人紧凑集成在培养箱机器人内,可实现接种、培养液更换、 细胞采收、冲洗、胰蛋白酶处理、废料处理等自动化操作。在GMP A级洁净等级下,机器人动作需要非常平稳缓和,以确保不会对脆弱的细胞产生破坏。
所有操作参数均储存在电脑端,包括体积、温度、时间和特定的机器人动作。

应用领域
致力于为细胞行业开发易于操作、使用灵活、安全性高的智能化机器人,以帮助用户提高工作效率、降本增效
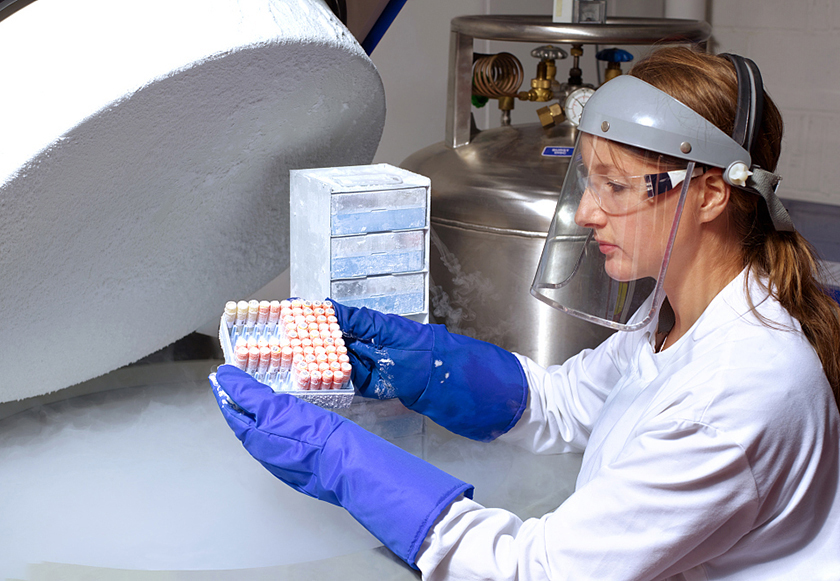
细胞冻存
细胞冻存主要是利用冻存技术将细胞置于-196℃液氮中低温保存,可以使细胞暂时脱离生长状态而将其细胞特性保存起来。

细胞培养
细胞培养可以由一个细胞经过大量培养成为简单的单细胞或极少分化的多细胞,通过培养箱培养可以获得大量细胞,其本身就是细胞的大规模克隆。

细胞扩增
通过细胞加换液方式进行细胞扩增,弃掉旧的培养基,换成新鲜的培养基来为细胞提供营养支持。
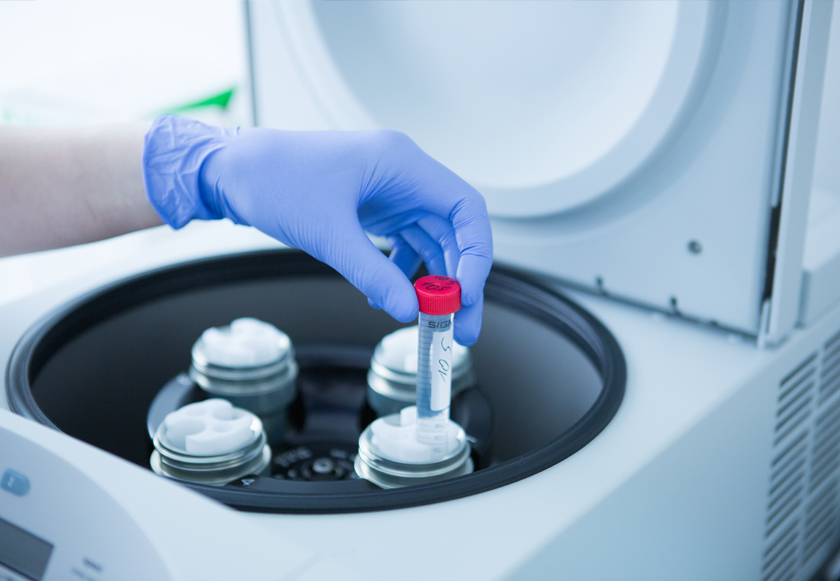
细胞提取
细胞提取利用离心机高速旋转产生的强大离心力,对样品溶液中悬浮物质进行高纯度分离、浓缩、精制,提取各种样品。
其他
细胞实验室,利用智能自动化来提高干细胞研发和生产效率,集中解决干细胞研究领域中的几个重要科学问题和临床医学问题。
想更进一步了智能机器人细胞设备解决方案,请联系我们的销售与技术支持团队。
联系我们